O robot consta de 3 placas que albergan os circuítos que fan posible o seu funcionamento.
A placa principal, denominada placa TOP alberga o microcontrolador e os circuítos auxiliares deste, a etapa de potencia, encargada de adaptar a tensión provinte das baterías a unha apta para os elementos do robot, a etapa de control dos motores e tamén serve de soporte de varios sensores, ademais do dispositivo de comunicación bluetooth seleccionado.
DESCRICIÓN DAS DISTINTAS ETAPAS DA PLACA TOP:
Etapa de potencia:
O seu elemento principal é o regulador de tensión LM7805, o cal reduce a tensión procedente das baterías, que entregan unha tensión máxima de 12,6V, a unha tensión de entre 4,8V e 5,2V. Para que isto se cumpra, a tensión de entrada (VI) mínima
ten que ser de 7V.
O LM7805 está conectado ao condensador cerámico C1 de 100nF e ao condensador electrolítico C2 de 16uF, estes condensadores melloran a resposta transitoria do sistema.
Esta etapa protexe ao sistema de posibles conexións erróneas dos terminais das baterías mediante o díodo D1, do tipo 1N4007.
Este circuíto pode alimentarse coas baterías a través dos pins VBAT e GND ou coa placa Arduino por ARD 5V e ARD GND; para evitar problemas de dobre conexión, o terminal ARD 5V e o VBAT conéctanse ao circuíto a través dun interruptor, o cal selecciona cal dos dous terminais alimentará ao circuíto. De alimentarse a través de Arduino, a corrente omite o paso polo LM7805, por estar xa regulada a 5V.
A saída deste circuíto está conectada á masa a través da resistencia R4 de 10K en serie co díodo LED vermello D2, o cal se acende cando esta etapa proporciona 5V, permitindo así unha fácil observación da correcta conexión.
Neste circuíto tamén están incluídas as resistencias R1, R2 de 20K e R3 de 5K que forman un divisor de tensión o cal divide a tensión presente en VBAT entre 3, o que permite conectar a súa saída o microcontrolador, xa que a tensión nunca rebasará a máxima admitida por este que é de 5V, este circuíto deséñase así por que as baterías entregan unha tensión máxima de
12,6V que se se divide entre 3 queda en 4,2V e non ocasiona problemas ao microcontrolador.

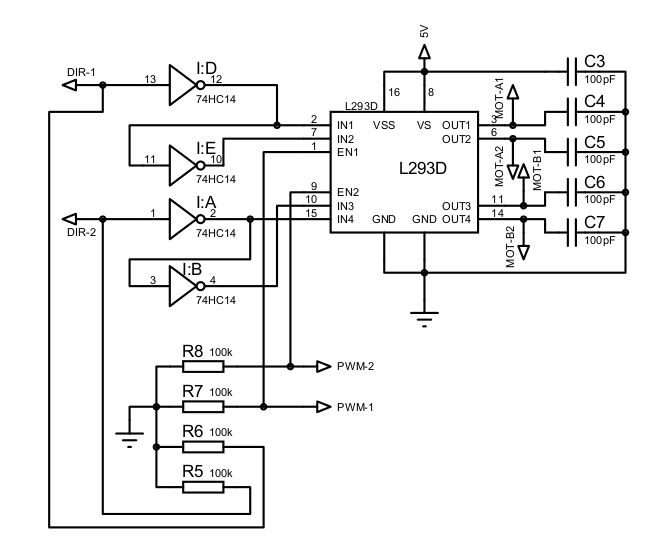
Control dos motores:
Esta etapa é necesaria para poder controlar o funcionamento dos motores, os cales teñen un consumo típico de 5V e 600 mA aprox. O microcontrolador non pode ofrecer estes niveis de corrente, por iso este circuíto é imprescindible.
O control dos motores é posible grazas a unha Ponte-H constituída polo circuíto L293D.

O L293D precisa dúas entradas de alimentación, conectadas aos pins 16 (Vss) e 8 (Vs).A primeira ten que ser de 5V e é empregada para alimentar a lóxica, mentres que a segunda é a da alimentación da carga, que neste caso tamén será de 5V.
Cada par de etapas do circuíto posúen unha entrada de inhibición pins 1 (EN1) e 9 (EN2) que permiten a deshabilitación das saídas pins 3 (OUT1),6 (OUT2) 11 (OUT3) e 14 (OUT4).
Os terminais de entrada 2 (IN1) e 7 (IN2) da etapa 1 e 2 están relacionados con EN1, OUT1 e OUT2, e encárganse do control do Motor-A. As entradas 10(IN3) e 15 (IN4) das etapas 3 e 4 relaciónanse igualmente con EN2, OUT3 e OUT4 ligadas estas a o Motor-B.
A resposta do Motor-A en función de IN1, IN2 e EN1 é o que se amosa a continuación.
IN1—IN2 —EN1—>Xira
H——-L——H—->Dereita
L——-H——H—->Esquerda
X——-X——L—->Parado
H: Entrada a nivel alto.
L: Entrada a nivel baixo.
X: Indiferente.
A resposta do Motor-B é similar a da o Motor-A.
A velocidade de xiro dos motores regúlase en función da tensión de alimentación dos mesmos. Isto faise aplicando un sinal de pulsos nos cales é posible controlar a súa anchura. Isto denomínase PWM (Pulse Width Modulated) ou Regulación por Ancho de Pulso.
As saídas OUTx conéctanse a masa a través dos condensadores cerámicos de 100 pF C4,C5,C6 e C7 para mellorar a resposta dinámica dos motores.
As entradas INx están conectadas ás portas inversoras do circuíto SN74HC14N, de tal forma que fan posible o funcionamento dos motores explicado arriba con tan só 2 terminais do microcontrolador por motor, DIR-1 e DIR-2,aforrando así saídas deste.
As conexións DIR-1 e DIR-2 encárganse do sentido de xiro dos motores e PWM-1 e PWM-2 conectados a ENx da súa velocidade mediante Modulación por Anchura de Pulso (PWM).
DIR-x e PWM-x conéctanse en paralelo cos compoñentes explicados, L293D e SN74HC14N, coas resistencias R5,R6,R7 e R8 de 100K para protexer ao circuíto.
O L293D admite unha corrente de pico máxima de 1,2A e unha media de 600mA. Isto tense en conta á hora de elixir os motores e a súa alimentación, porque a corrente máxima de cada motor alimentado a 6V é de 760mA e se os motores son forzados a deterse mentres se lle da a orde de xirar, a corrente máxima pode ser de 1520mA o que superaría a corrente de pico do L293D, por isto se redúce a tensión dos motores a 5V, rebaixando tamén así a súa corrente máxima por debaixo do límite do L293D.
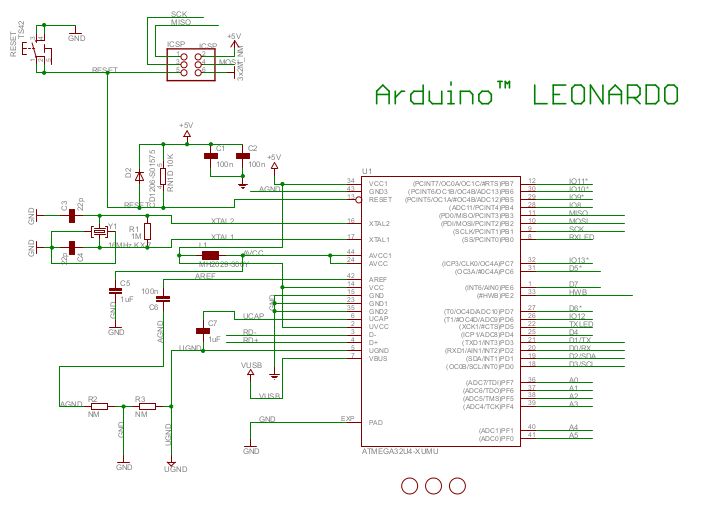
Etapa de control:

O esquema anterior corresponde a etapa de control. Nel obsérvase o cristal X1 de 16MHz conectado entre os condensadores C8 e C9, os cales veñen marcados nas follas de características do Arduino Leonardo, o esquema que fai mención a estes
compoñentes. Tamén veñen indicadas nas follas de características do Arduino Leonardo as conexións de alimentación como son as dos pins 7 de tensión e 8 e 22 de masa que non aparecen no esquema, o 1 de reset, e os 20 e 21 de tensión.
Tamén se incluíu o díodo LED D1 coa resistencia en serie R11, ambos conectados ao pin 19 que corresponde co porto dixital 13 e que ten certas características coma a de parpadear no momento de cargar os programas, pero que tamén pode ser programado para que se ilumine cando sexa preciso.
Introduciuse un MINIPULSADOR conectado ao pin 6 corresponde co porto dixital 4.
Para a carga de programas utilízanse as conexións ARD1,2,3 e 4 correspondentes cos pins 18, 1, 19 e 17 respectivamente; estas conéctanse á placa Arduino Leonardo tal e como se explicará nunha próxima entrada. Con esta conexión, conectado a placa Arduino por USB ao ordenador é posible a carga dos programas no microcontrolador.
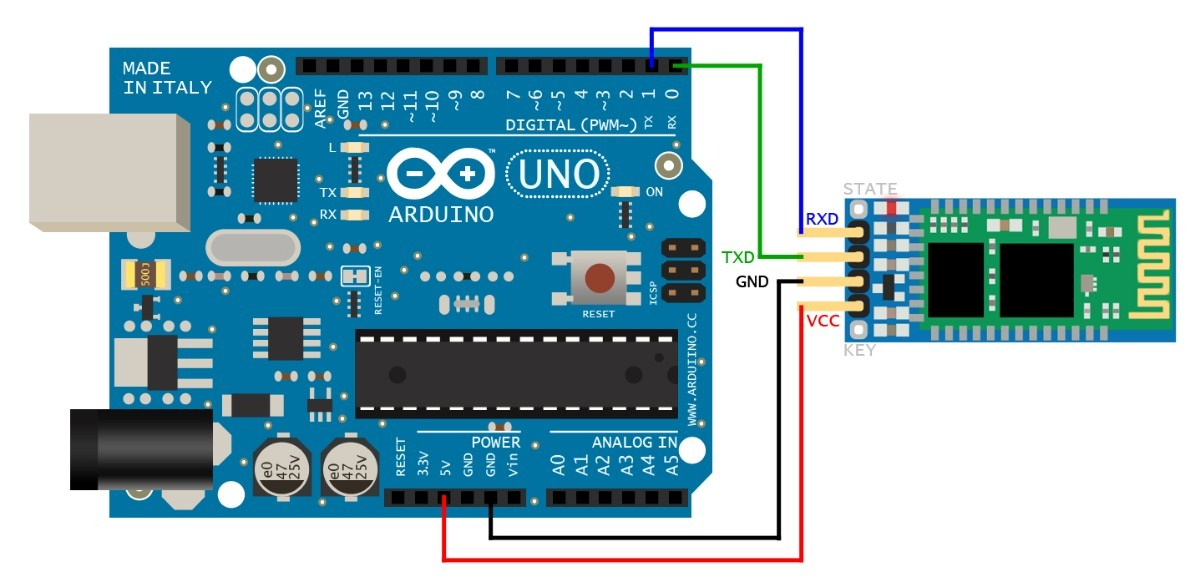
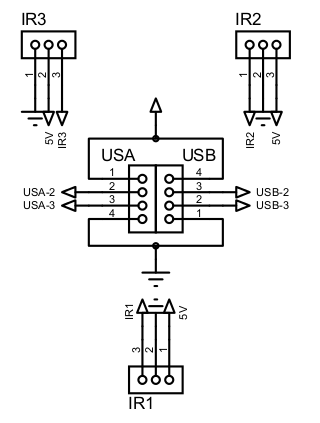
O bloque de terminais BLUE é a entrada do Módulo de Bluetooth JY-MCU, o cal ten que conectarse de forma que os seus pins cadren cos do esquema seguinte.

Cabe mencionar que o porto RX do Atmega conéctase co porto TX do Bluetooth e o porto RX deste, co TX do Atmega.
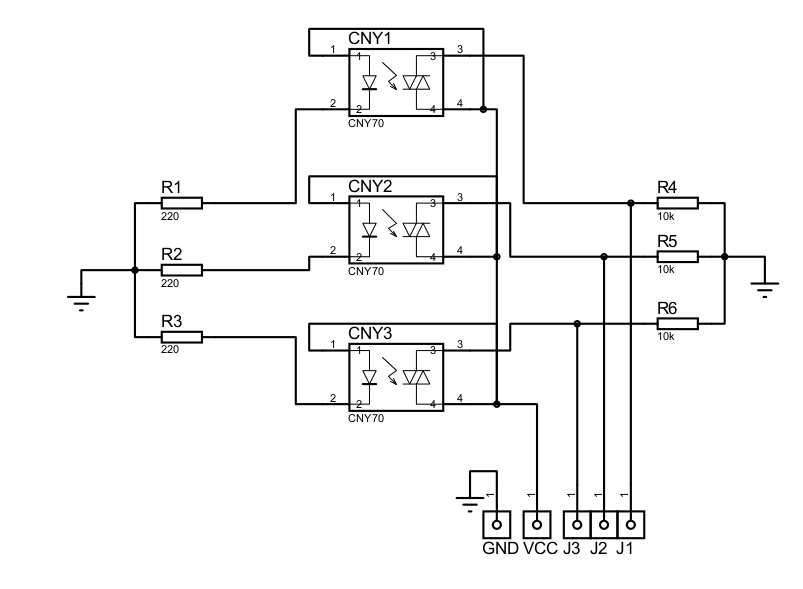
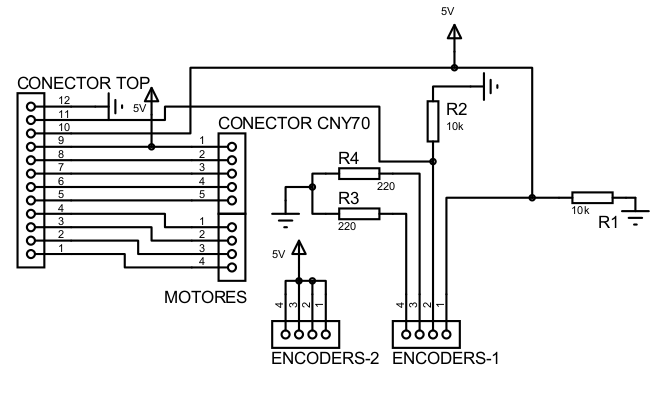
Etapa dos sensores.
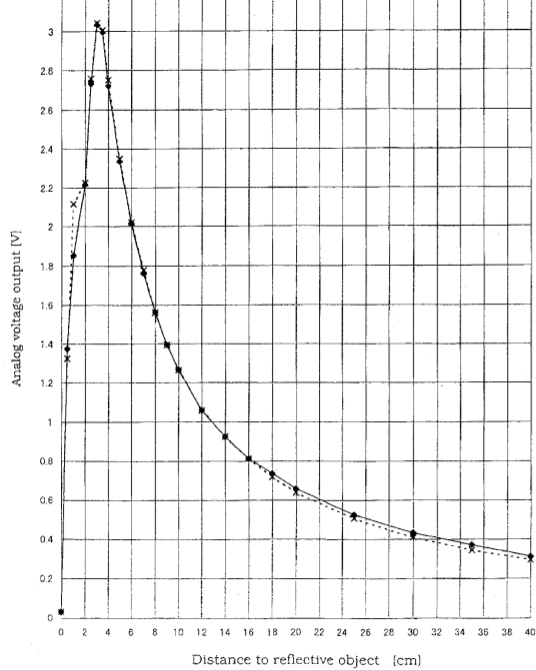
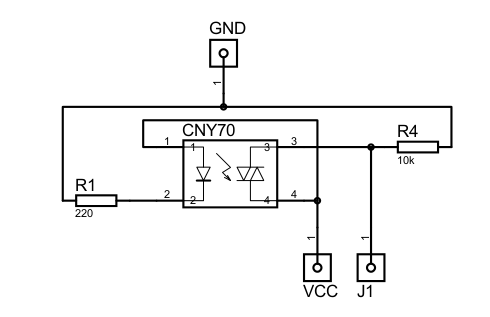
Esta etapa corresponde aos sensores situados no circuíto TOP. Estes son IR1,2,3 que corresponden con sensores de infravermellos SHARP 0A41SK, ademais de USA e USB, que son os sensores de ultrasóns HC-SR04. Todos estes funcionan cunha tensión de alimentación de 5V.

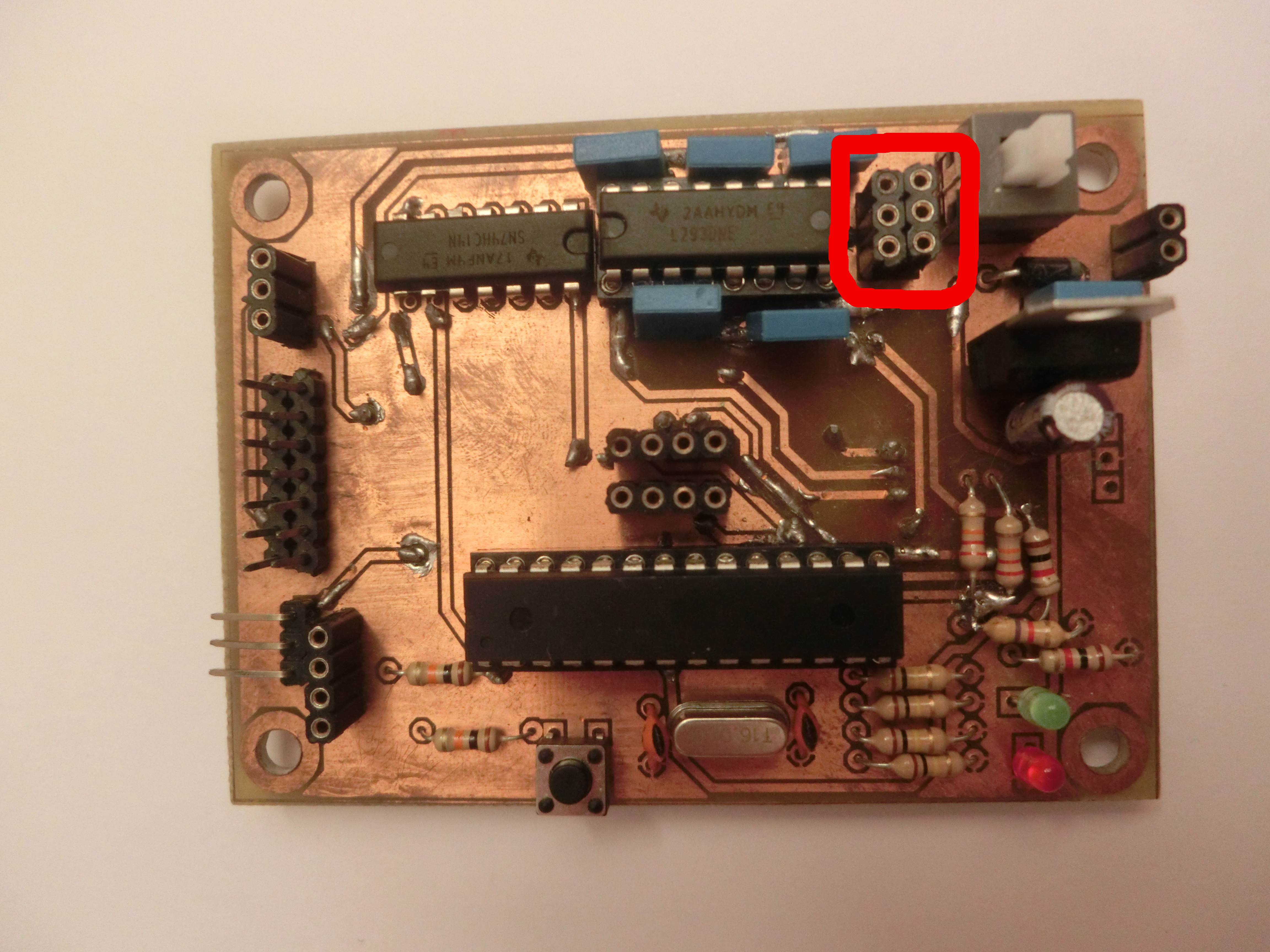
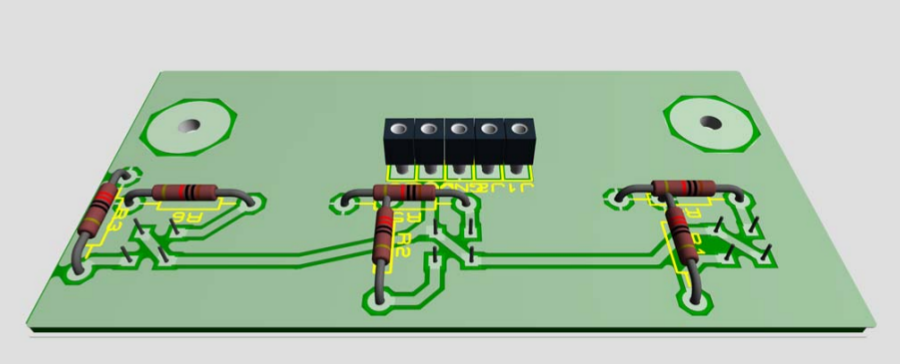
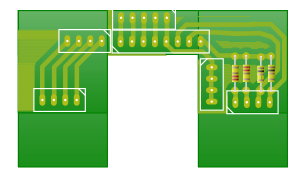
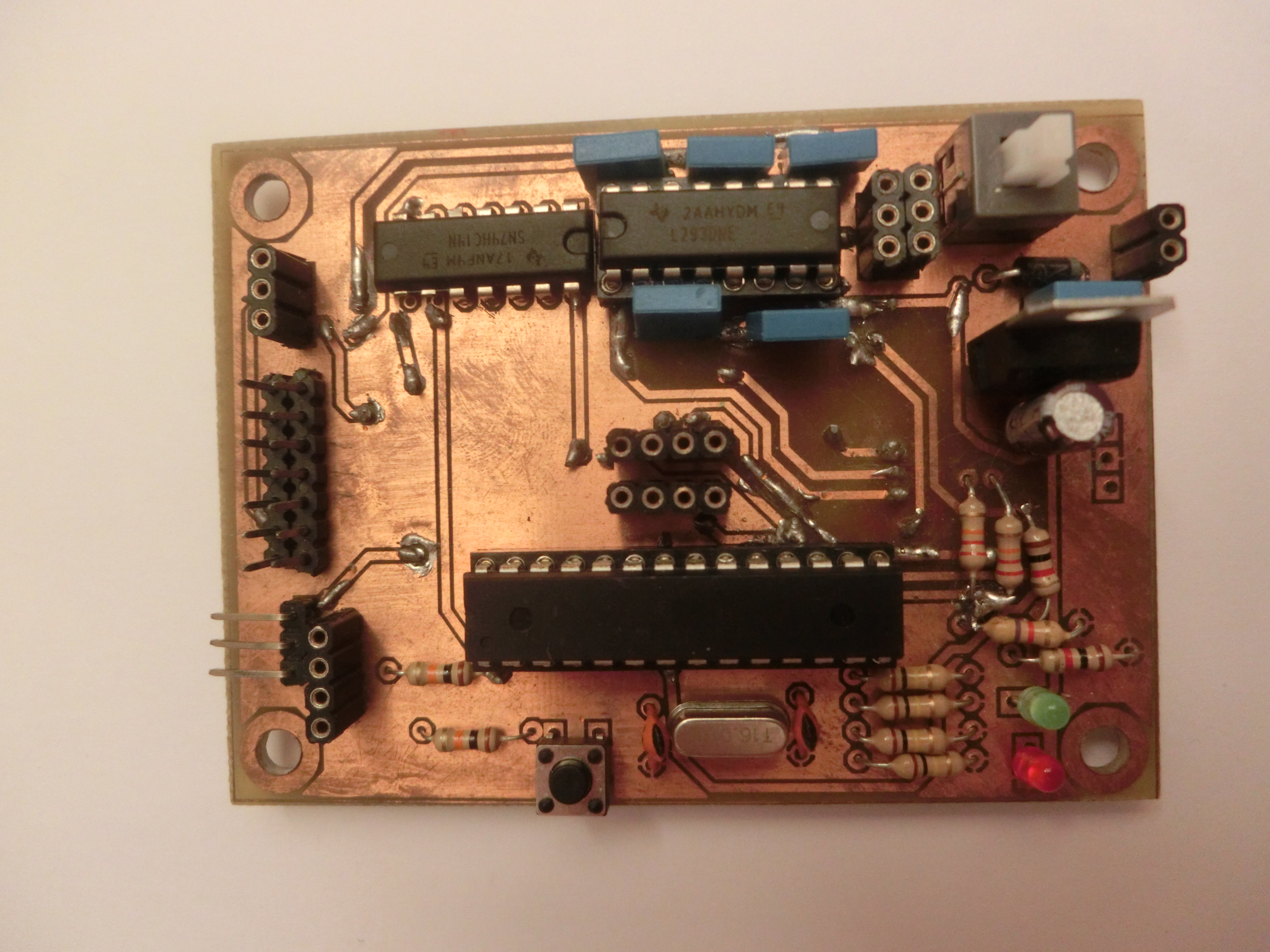
A continuación, unha simulación da placa deseñada seguida da placa real.


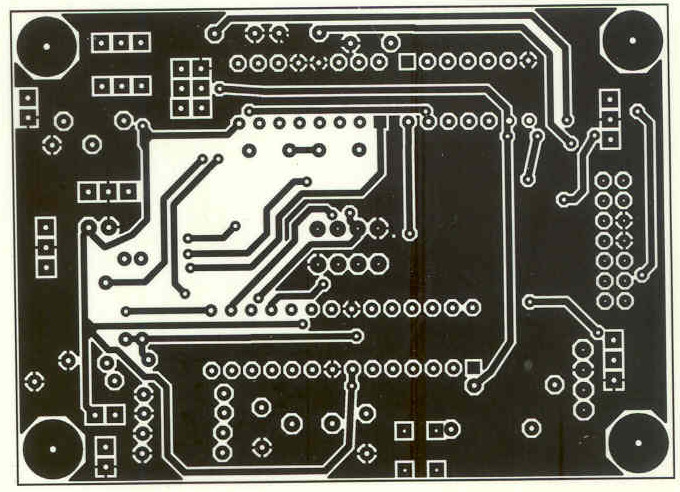
Para realizar esta placa deseñouse o fotolito seguinte:
Cara superior

Cara Inferior

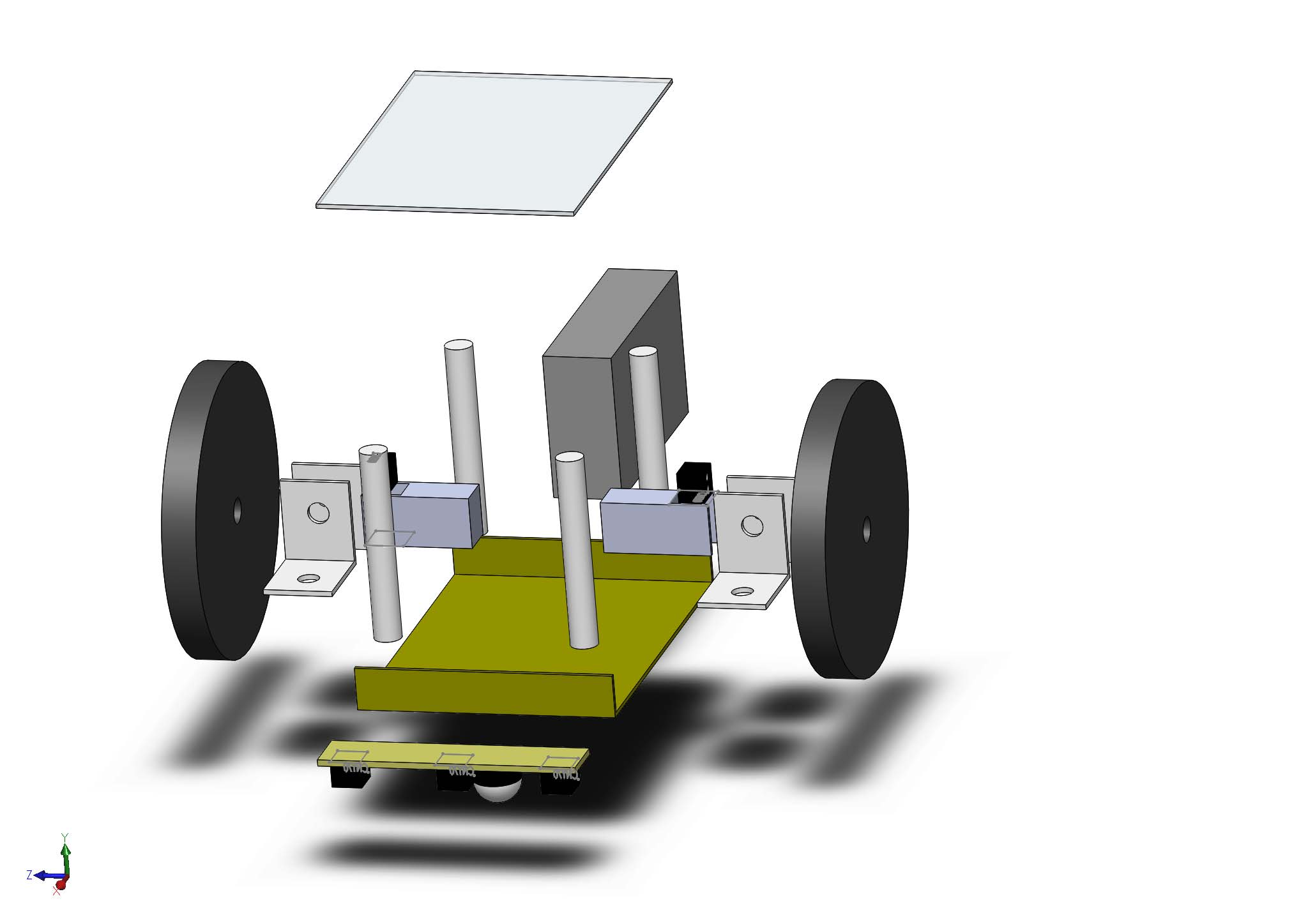
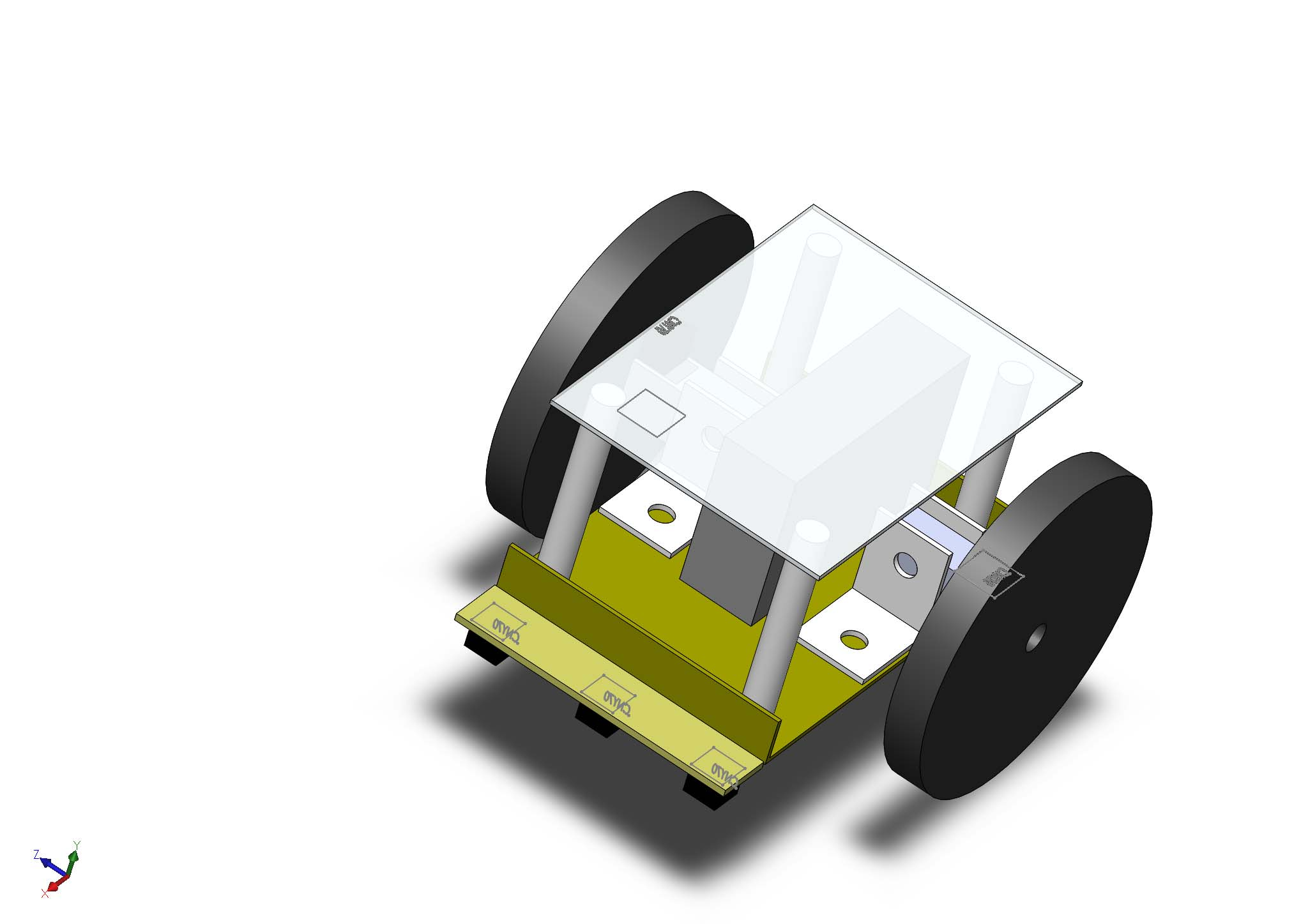 Na ilustración pode verse unha simulación do robot deseñado. Nela obsérvase que a súa estrutura está dividida en dúas plantas. A planta superior formada pola placa TOP e a planta inferior formada pola placa BOT, a cal da cabida ao circuíto BOT, aos motores e as
Na ilustración pode verse unha simulación do robot deseñado. Nela obsérvase que a súa estrutura está dividida en dúas plantas. A planta superior formada pola placa TOP e a planta inferior formada pola placa BOT, a cal da cabida ao circuíto BOT, aos motores e as