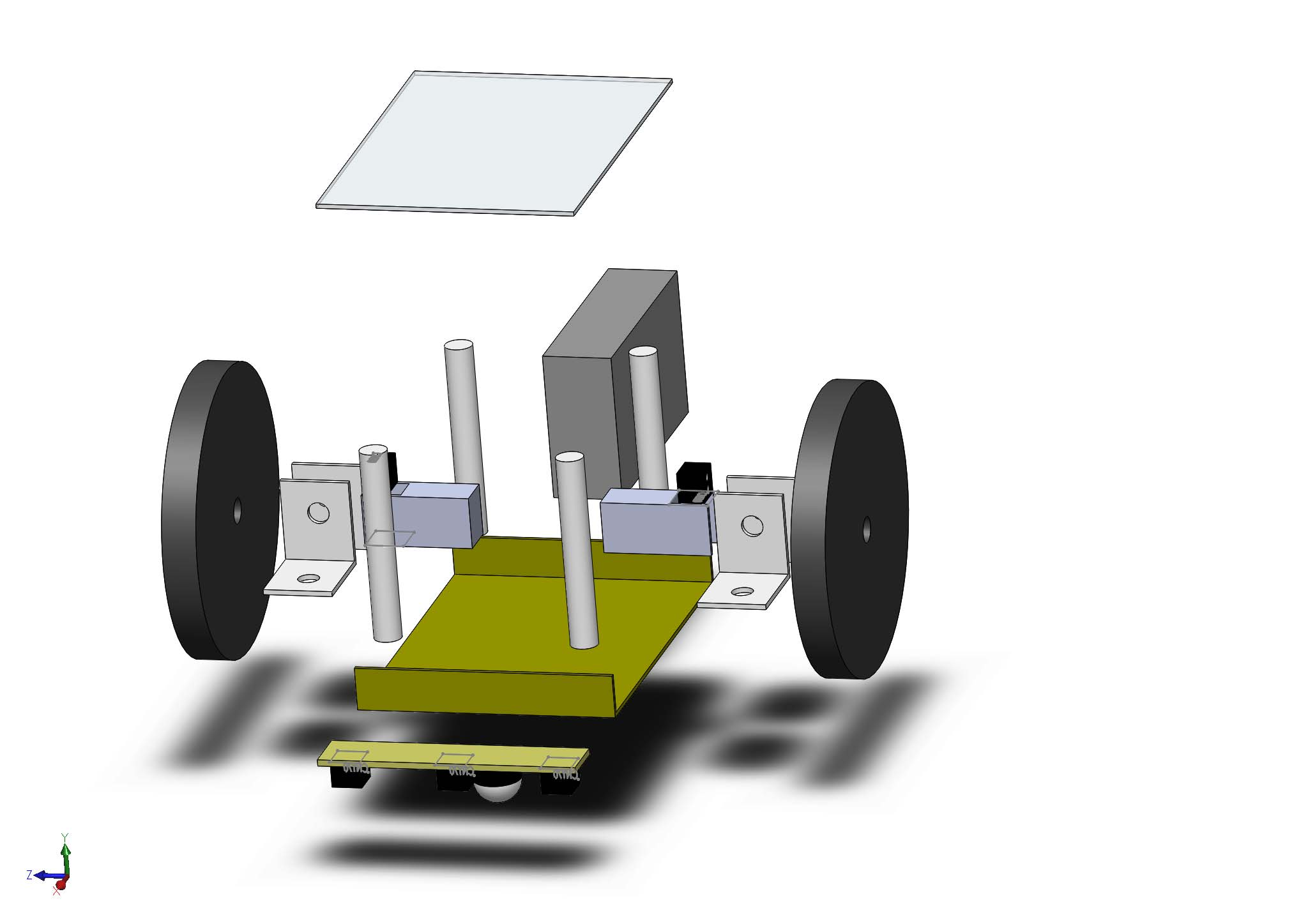
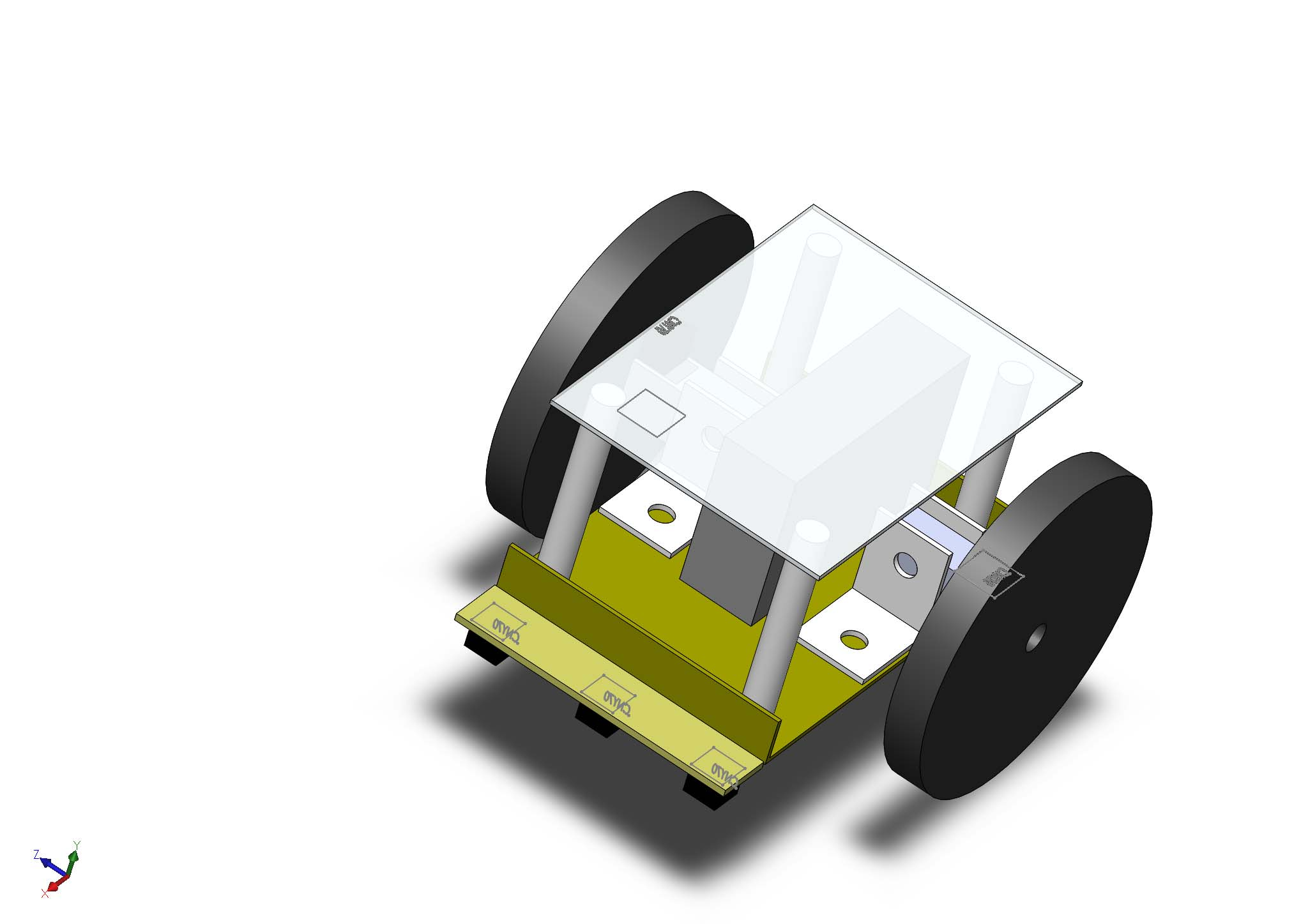
 Na ilustración pode verse unha simulación do robot deseñado. Nela obsérvase que a súa estrutura está dividida en dúas plantas. A planta superior formada pola placa TOP e a planta inferior formada pola placa BOT, a cal da cabida ao circuíto BOT, aos motores e as
Na ilustración pode verse unha simulación do robot deseñado. Nela obsérvase que a súa estrutura está dividida en dúas plantas. A planta superior formada pola placa TOP e a planta inferior formada pola placa BOT, a cal da cabida ao circuíto BOT, aos motores e as
baterías, ademais de dar soporte á placa S.LINEAS e os sensores de infravermellos.
PLACA BOT:
A superficie que fai de soporte da planta inferior é unha lámina de 1mm de grosor de latón.
Ten forma de U para que se poidan fixar sensores na súa cara dianteira e para que impida a caída das baterías pola parte traseira.

PLACA TOP:
A placa superior é a formada polo circuíto TOP.
As placas TOP e BOT están unidas por catro varillas roscadas de 45 mm de lonxitude e 6,40 mm de diámetro. Estas varillas poden obterse en calquera ferraxería cunha lonxitude de 1 m. Para o robot precisaremos 2 destas, xa que só podemos empregar os 2 extremos de cada unha, porque ao cortar a varilla, estropéase a rosca e non podemos introducir as torcas necesarias para fixar as placas.
O material empregado nesta placa é a baquelita de 1mm de espesor.
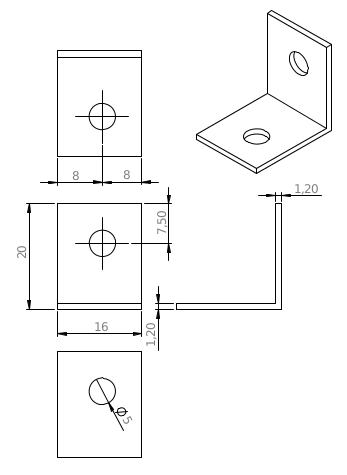
ESCUADRAS:
Os motores están suxeitos á placa inferior por dúas escuadras de aluminio. Poden obterse en calquera ferraxería.
Estas pezas están aparafusadas á placa inferior e pegadas aos motores de tal forma que estes queden inmobilizados, impedindo unha rotación ou desprazamento non desexados. A altura dos motores pode regularse á hora de pegalos as escuadras, para así variar a altura e a inclinación do robot.
RODAS:
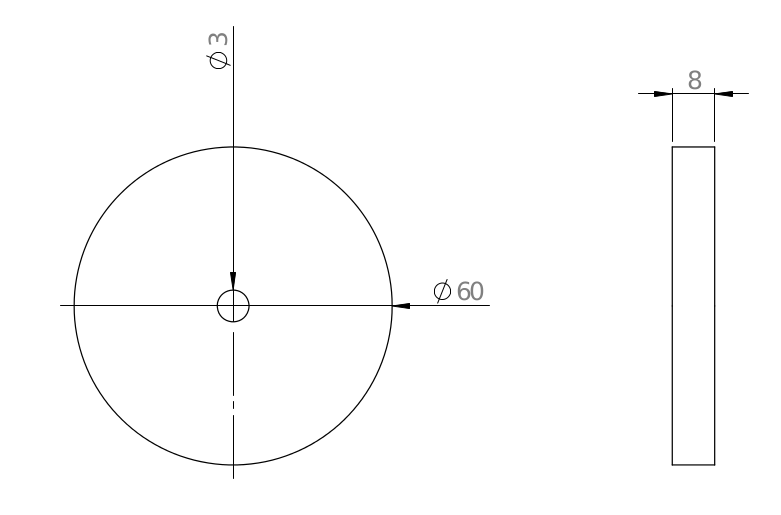
As rodas son tamén un elemento moi importante. Estas teñen un diámetro de 60 mm e unha anchura de 8 mm.
Teñen unha abertura no centro a cal permite o seu correcto encaixe cos motores. Están construídas en plástico negro e a súa parte exterior está recuberta por unha goma, a cal mellora a adherencia coa superficie. Esta goma pode ser retirada e substituída por outra de considerarse necesario.
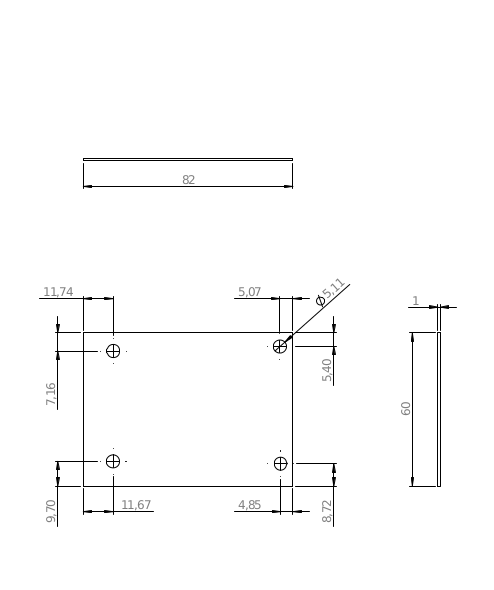
PLACA S.LINEAS:
Na parte dianteira inferior sitúase outra placa, encargada de portar os sensores e o circuíto S.LINEAS empregando tamén a baquelita como material de construción.

RODA LOCA:
Na parte inferior-dianteira sitúase unha roda loca de 9,5mm de diámetro constituída por unha bola de plástico que xira libre nun soporte o cal vai pegado a placa BOT e impide que a bola se desprenda. A funcionalidade desta bola é a de impedir que o robot roce contra o chan mellorando así a súa mobilidade.
DESPECE DO ROBOT