A selección e a instalación dos distintos sensores no robot é unha das tareas máis complexas, xa que estes determinarán a capacidade de recoñecemento do entorno por parte do robot.
Empréganse 3 sensores distintos no robot, os cales se clasifícan en 2 grupos.
O primeiro grupo de sensores emprégase para detectar obstáculos a media-longa distancia. Os sensores escollidos neste grupo son:
Sensores de Infravermellos SHARP GP2D os cales teñen un rango de medida de entre 10 e 80 cm. Estes sensores aliméntanse a 5V. Constan de 3 cables, normalmente:
- Vermello –> 5V (+)
- Negro –> GND (-)
- Branco –> Saída analóxica.
A saída analóxica pode conectarse directamente a unha entrada analóxica dun microcontrolador ou a unha tarxeta Arduino ou similar.
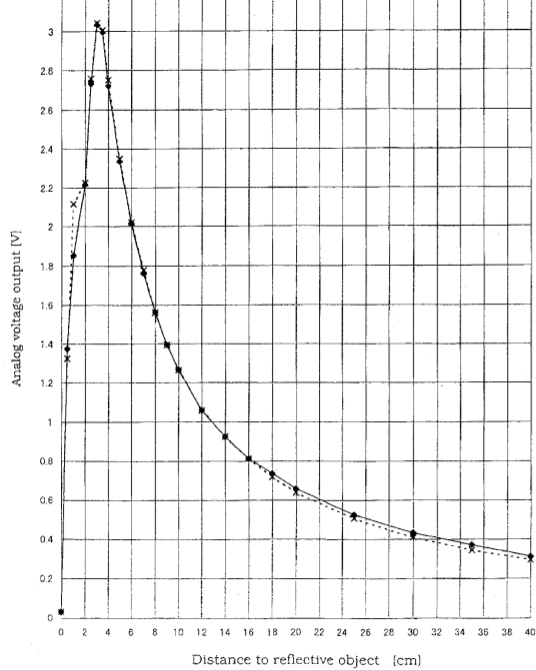
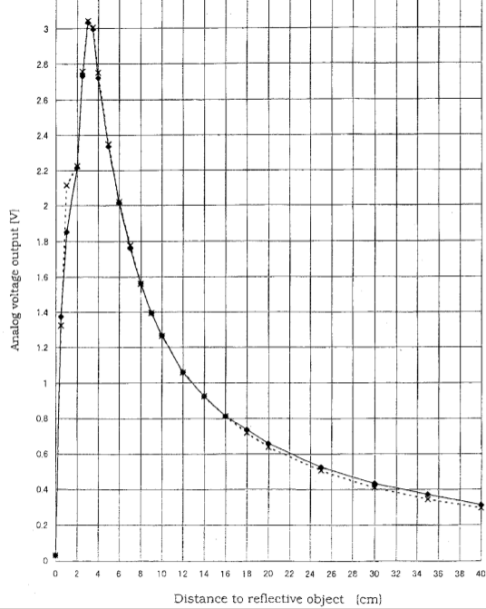
Na imaxen seguinte pode verse a gráfica ofrecida polo fabricante a cal indica a “suposta” distancia á que se atopa un obstáculo do sensor en función da tensión emitida por este. Digo “suposta” porque a tensión emitida por estes sensores varía enormemente en función do material do obxecto ou do ángulo no que reflicte o faz infravermello.
 Neste link pode accederse a 2 programas para Arduino que permiten traballar cos sensores SHARP.
Neste link pode accederse a 2 programas para Arduino que permiten traballar cos sensores SHARP.
O outro tipo de sensores empregados para detectar obstáculos a media-longa distancia son os de ultrasóns HC-SR04.
Estes sensores ofrecen un rango de medida entre 2 a 400 cm e precisan unha tensión de alimentación de 5V. A súa conexión é a través de 4 pins:
- Vcc –> 5V (+)
- Trig –> Saída dixital.
- Echo –> Saída dixital.
- GND –> GND (-)
Estos sensores, máis complexos que os anteriores, permiten, empregando as librerías correctas, obter a distancia ao obxeto sen ter que consular ningunha táboa.
Importante ter en conta a conexión dos pins Echo e Trig. No programa que se pode ver aquí, os pins aos que se conectan estes veñen definidos na líña:
Ultrasonic ultrasonic(6,7); //(Trigger pin,Echo pin)
No segundo grupo están os sensores empregados para seguir lineas no chan. Isto é preciso para realizar probas de robots segue-liñas.
Os sensores elixidos son os CNY-70. Estes teñen un rango de medida que varía entre 0 e 5 mm. Por isto teñen que ir situados moi preto da superficie a sensar. A súa alimentación é a 5V.
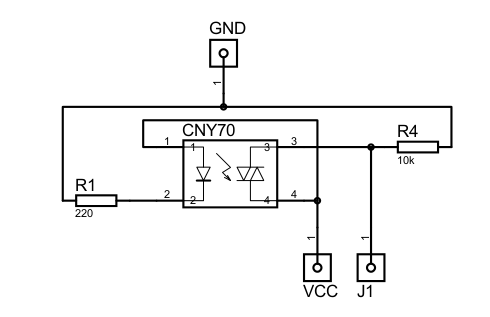
O seu conexionado pode ser o seguinte:
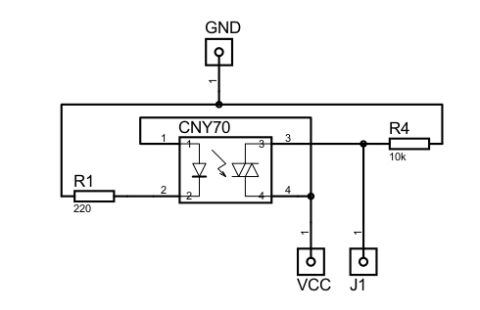 Co circuíto mostrado na imaxen anterior, pode medirse nunha entrada analóxica dun microcontrolador a tensión ofrecida por este sensor.
Co circuíto mostrado na imaxen anterior, pode medirse nunha entrada analóxica dun microcontrolador a tensión ofrecida por este sensor.
- Vcc –> 5V (+)
- GND –> GND (-)
- J1 –> Saída analóxica.
Con este programa pode medirse o valor de tensión a saída do sensor e evaluar que valor é o óptimo para diferenciar as liñas ou as marcas do resto da superficie.
Que a saída do sensor se lea de forma analóxica é unha mellora respecto a circuítos que ofrecen a saída dunha forma dixital, xa que os valores de cambio de cor poden regularse para cada circunstancia.